首页 > 图像处理 > 正文
原创文章,转载请注明出处!
本文链接:http://daiwk.github.io/posts/cv-object-detection.html
目标检测汇总
标签:目标检测, rcnn, ssd, yolo, retainnet, fast rcnn, faster rcnn, fpn, yolo nano, gaussian yolov3
2018-04-29
目录
历史回顾
同时参考一文读懂目标检测:R-CNN、Fast R-CNN、Faster R-CNN、YOLO、SSD
- 传统的目标检测算法:Cascade + HOG/DPM + Haar/SVM以及上述方法的诸多改进、优化;
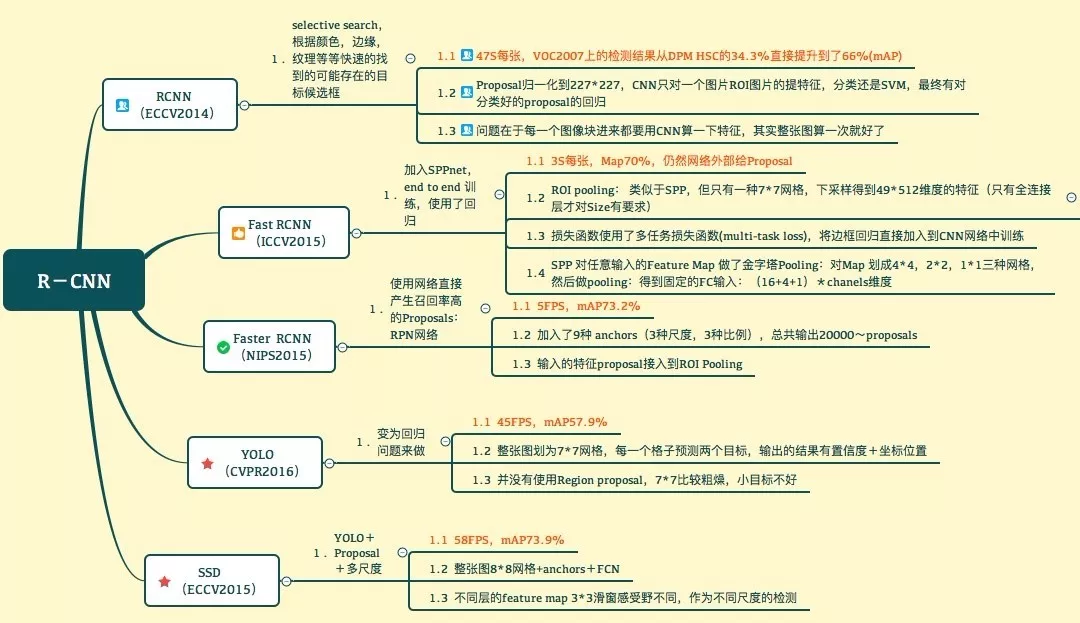
- 候选区域/框 + 深度学习分类:通过提取候选区域,并对相应区域进行以深度学习方法为主的分类的方案,如:
- R-CNN(Selective Search + CNN + SVM)
- SPP-net(ROI Pooling)
- Fast R-CNN(Selective Search + CNN + ROI)
- Faster R-CNN(RPN + CNN + ROI)
- R-FCN等系列方法;
- 基于深度学习的回归方法:YOLO/SSD/DenseBox 等方法;以及最近出现的结合RNN算法的RRC detection;结合DPM的Deformable CNN等
开源库:Detectron
https://github.com/facebookresearch/Detectron
如果你正在寻找最先进的物体检测算法,那么你可以使用Detectron。
它由Facebook开发,是AI Research软件系统的一部分。它利用Caffe2深度学习框架和Python。
YOLO nano
比Tiny YOLOv3小8倍,性能提升11个点,4MB的网络也能做目标检测
YOLO Nano: a Highly Compact You Only Look Once Convolutional Neural Network for Object Detection
研究者提出了名为 YOLO Nano 的网络。这一模型的大小在 4.0MB 左右,比 Tiny YOLOv2 和 Tiny YOLOv3 分别小了 15.1 倍和 8.3 倍。在计算上需要 4.57B 次推断运算,比后两个网络分别少了 34% 和 17%。
在性能表现上,在 VOC2007 数据集取得了 69.1% 的 mAP,准确率比后两者分别提升了 12 个点和 10.7 个点。研究者还在 Jetson AGX Xavier 嵌入式模块上,用不同的能源预算进行了测试,进一步说明 YOLO Nano 非常适合边缘设备与移动端。
gaussian yolov3
原创文章,转载请注明出处!
本文链接:http://daiwk.github.io/posts/cv-object-detection.html
上篇:
rl代码集合
下篇:
tensorflow优化
comment here..