深入浅出强化学习-chap3 基于模型的动态规划方法
标签:深入浅出强化学习, 基于模型的动态规划目录
参考《深入浅出强化学习》
1. 基于模型的动态方法理论
一个完整的已知模型的马尔科夫决策过程可以用元组\(S,A,P,r,\gamma\)表示。\(S\)为状态集,\(A\)为动作集,\(P\)为转移概率【对应环境和智能体的模型】,\(r\)为回报函数,\(\gamma\)为折扣因子,用于计算累积回报\(R=\sum_{t=0}^T\gamma ^tr_t\)。若\(T\)为有限值,强化学习过程称为有限范围强化学习。若\(T=\infty\),称为无限范围强化学习。下面以有限范围强化学习为例。
强化学习的目标是找到最优策略\(\pi\),使得累积回报的期望最大。策略是状态到动作的映射\(\pi:s\rightarrow a\),\(\tau \)表示从状态\(s_t\)到最终状态\(s_T\)的一个序列\(\tau:s_t,s_{t+1},...,s_T\),目标函数是累积回报函数的期望\(\int R(\tau)p_{\pi}(\tau)d\tau\)。
所以强化学习的目标是:\(\underset{\pi}{max}\int R(\tau)p_{\pi}(\tau)d\tau\),最终目标是找到最优策略\(\pi ^*:s\rightarrow u^*\)。这里的\(u\)指的是决策序列\(u_0^*\rightarrow u_1^*\rightarrow ...u_T^*\),所以,广义上来讲,强化学习就是找到一个决策序列,使得目标函数最优。
强化学习的分类如下图所示:
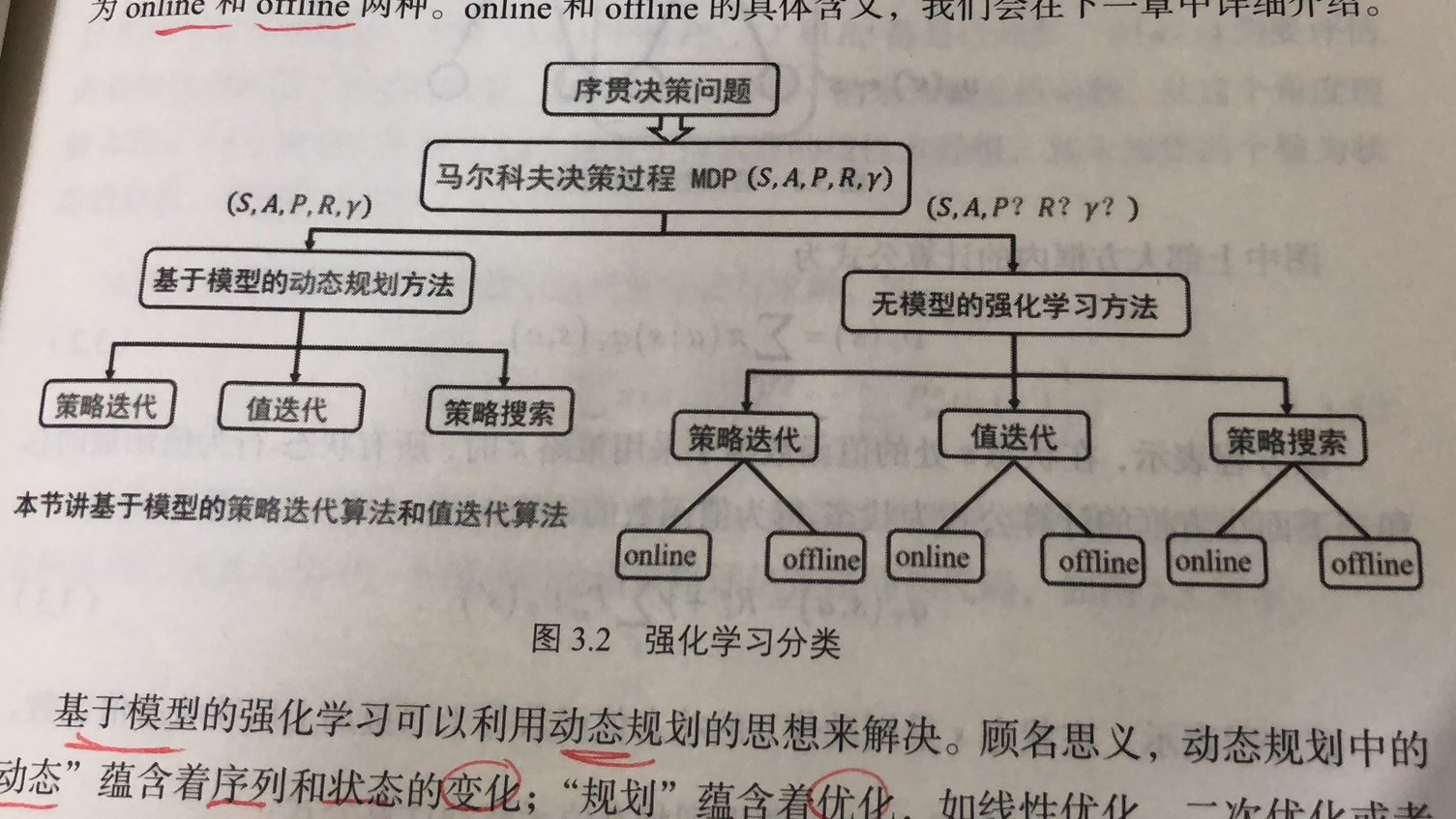
根据转移概率\(P\)是否已知,可以分为基于模型的动态规划方法,和基于无模型的强化学习方法。
这两种方法都包括策略迭代算法、值迭代算法和策略搜索算法。而基于无模型的强化学习方法中,每类方法又分为online和offline。
1.1 动态规划
基于模型的强化学习可以用动态规划的思想来解决。“动态”,指序列和状态的变化;“规划”,指优化,如线性优化、二次优化或非线性优化。
利用动态规划可解决的问题需要满足两个条件:
- 整个优化问题可以分解为多个子优化问题。
- 子优化问题的解可以被存储和重复利用。
第二章说到,强化学习可以利用马尔科夫决策过程来描述,利用贝尔曼最优性原理得到贝尔曼最优化方程:
\[
\\\upsilon ^*(s)=\underset{a}{max}R^a_{s}+\gamma \sum _{s'\in S}P^a_{ss'}\upsilon ^*(s')
\\q^*(s,a)=R^a_{s}+\gamma \sum _{s'\in S}P^a_{ss'}\underset{a}{max}q^*(s',a')
\]
可见马尔科夫决策问题符合使用动态规划的两个条件,所以可以用动态规划来解决。
动态规划的核心是找到最优值函数。
由上一章可以得到如下状态值函数的计算方法:
\[
\upsilon_{\pi}(s)=\sum_{a\in A}\pi(a|s)(R^a_{s}+\gamma \sum_{s'\in S}P^a_{ss'}\upsilon_{\pi}(s'))
\]
从上式中可见,状态s处的值函数\(\upsilon_{\pi}(s)\)可以用后继状态的值函数\(\upsilon_{\pi}(s')\)来表示,而后继状态的值函数是未知的,所以这就是bootstrap算法。
上式中,对于模型已知的强化学习算法,\(P^a_{ss'}\)、\(\gamma\)和\(R^a_{s}\)都是已知的,\(\pi(a|s)\)是要评估的策略,是指定的,也是已知的。所以未知数就是值函数,未知数的个数为状态的总数,用\(|S|\)表示。
下面介绍如何求解上述公式(其实就是关于值函数的线性方程组)
1.2 策略迭代算法
1.2.1 策略评估算法
使用高斯-赛德尔迭代算法:
\[
\upsilon_{k+1}(s)=\sum_{a\in A}\pi(a|s)(R^a_{s}+\gamma \sum_{s'\in S}P^a_{ss'}\upsilon _{k}(s'))
\]
算法步骤如下:
- 输入:需要评估的策略
\(\pi\)状态转移概率\(P^a_{ss'}\)回报函数\(R^a_s\),折扣因子\(\gamma\)- 初始化值函数:
\(\upsilon(s)=0\)- repeat k=0,1,…
- for s in S:
\(\upsilon_{k+1}(s)=\sum _{a\in A}\pi(a|s)(R^a_{s}+\gamma \sum_{s'\in S}P^a_{ss'}\upsilon_k(s'))\)- until
\(\upsilon_{k+1}=\upsilon_k\)- 输出:
\(\upsilon(s)\)
注意:每次迭代都需要对状态集进行一次遍历,以评估每个状态的值函数。
1.2.2 贪婪策略
1.2.3 策略迭代算法
1.3 值函数迭代算法
- 输入:状态转移概率
\(P^a_{ss'}\),回报函数\(R^a_{s}\),折扣因子\(\gamma\),初始化值函数\(\upsilon(s)=0\),初始化策略\(\pi_0\)- Repeat
\(l=0,1,...\)- for every
\(s\)do\(\upsilon _{l+1}(s)=\underset{a}{max}R^a_{s}+\gamma \sum _{s'\in S}P^a_{ss'}\upsilon _l(s')\)- Until
\(\upsilon _{l+1}=\upsilon _l\)- 输出:
\(\pi(s)=argmax_aR^a_{s}+\gamma \sum _{s'\in S}P^a_{ss'}\upsilon _l(s')\)
1.4 解决最优控制问题的三种算法
1.4.1 变分法原理
1.4.2 庞特里亚金最大值原理
1.4.3 动态规划方法
2. 动态规划中的数学基础
2.1 线性方程组的迭代解法
2.2 压缩映射证明策略评估的收敛性
3. 基于gym的编程实例
4. 最优控制与强化学习比较
原创文章,转载请注明出处!
本文链接:http://daiwk.github.io/posts/rl-stepbystep-chap3.html