tensorflow分布式部署
标签:tensorflow, 分布式, 部署目录
参考[深度学习] 分布式Tensorflow 2.0 介绍(二)
单机多gpu
官方demo参考:models/tutorials/image/cifar10/
- 假设你的机器上有3个GPU;
- 在单机单GPU的训练中,数据是一个batch一个batch的训练。在单机多GPU中,数据一次处理3个batch(假设是3个GPU训练),每个GPU处理一个batch的数据计算。
- 变量,或者说参数,保存在CPU上
- 刚开始的时候数据由CPU分发给3个GPU,在GPU上完成了计算,得到每个batch要更新的梯度。
- 然后在CPU上收集完了3个GPU上的要更新的梯度,计算一下平均梯度,然后更新参数。
- 然后继续循环这个过程。
处理的速度取决于最慢的那个GPU的速度。如果3个GPU的处理速度差不多的话,处理速度就相当于单机单GPU的速度的3倍减去数据在CPU和GPU之间传输的开销,实际的效率提升看CPU和GPU之间数据的速度和处理数据的大小。
分布式多机多GPU训练
随着设计的模型越来越复杂,模型参数越来越多,越来越大,如果每次计算一轮,都要计算梯度、更新参数,当参数的量级上升到百亿量级甚至更大之后,参数的更新的性能都是问题。如果是单机16个GPU,一个step最多也是处理16个batch,这对于上TB级别的数据来说,不知道要训练到什么时候。于是就有了分布式的深度学习训练方法,或者说框架。
参数服务器
前面说道,当你的模型越来越大,模型的参数越来越多,多到模型参数的更新,一台机器的性能都不够的时候,很自然的我们就会想到把参数分开放到不同的机器去存储和更新。
因为碰到上面提到的那些问题,所有参数服务器就被单独拧出来,于是就有了参数服务器的概念。参数服务器可以是多台机器组成的集群,这个就有点类似分布式的存储架构了,涉及到数据的同步,一致性等等,一般是key-value的形式,可以理解为一个分布式的key-value内存数据库,然后再加上一些参数更新的操作。反正就是当性能不够的时候,几百亿的参数分散到不同的机器上去保存和更新,解决参数存储和更新的性能问题。
tensorflow的分布式
in-graph 模式
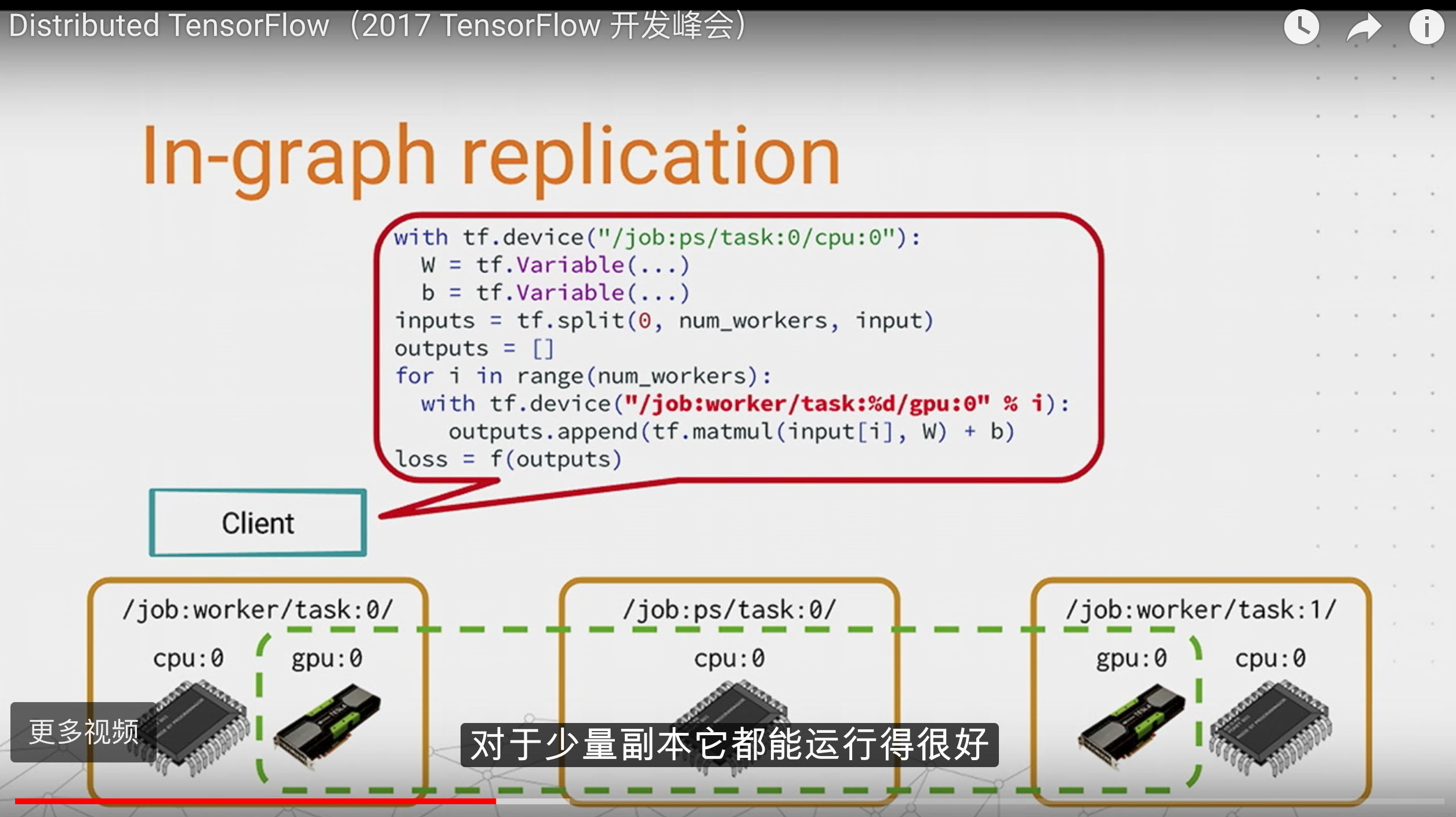
一个client(显示调用tf::Session的进程),将里面的参数和ops指定给对应的job去完成.数据分发只由一个client完成.
in-graph模式和单机多GPU模型有点类似。in-graph模式,把计算已经从单机多GPU,已经扩展到了多机多GPU了,不过数据分发还是在一个节点。这样的好处是配置简单,其他多机多GPU的计算节点,只要起个join操作,暴露一个网络接口,等在那里接受任务就好了。这些计算节点暴露出来的网络接口,使用起来就跟本机的一个GPU的使用一样,只要在操作的时候指定tf.device(“/job:worker/task:n”),就可以向指定GPU一样,把操作指定到一个计算节点上计算,使用起来和多GPU的类似。但是这样的坏处是训练数据的分发依然在一个节点上,要把训练数据分发到不同的机器上,严重影响并发训练速度。在大数据训练的情况下,不推荐使用这种模式。
between-graph模式
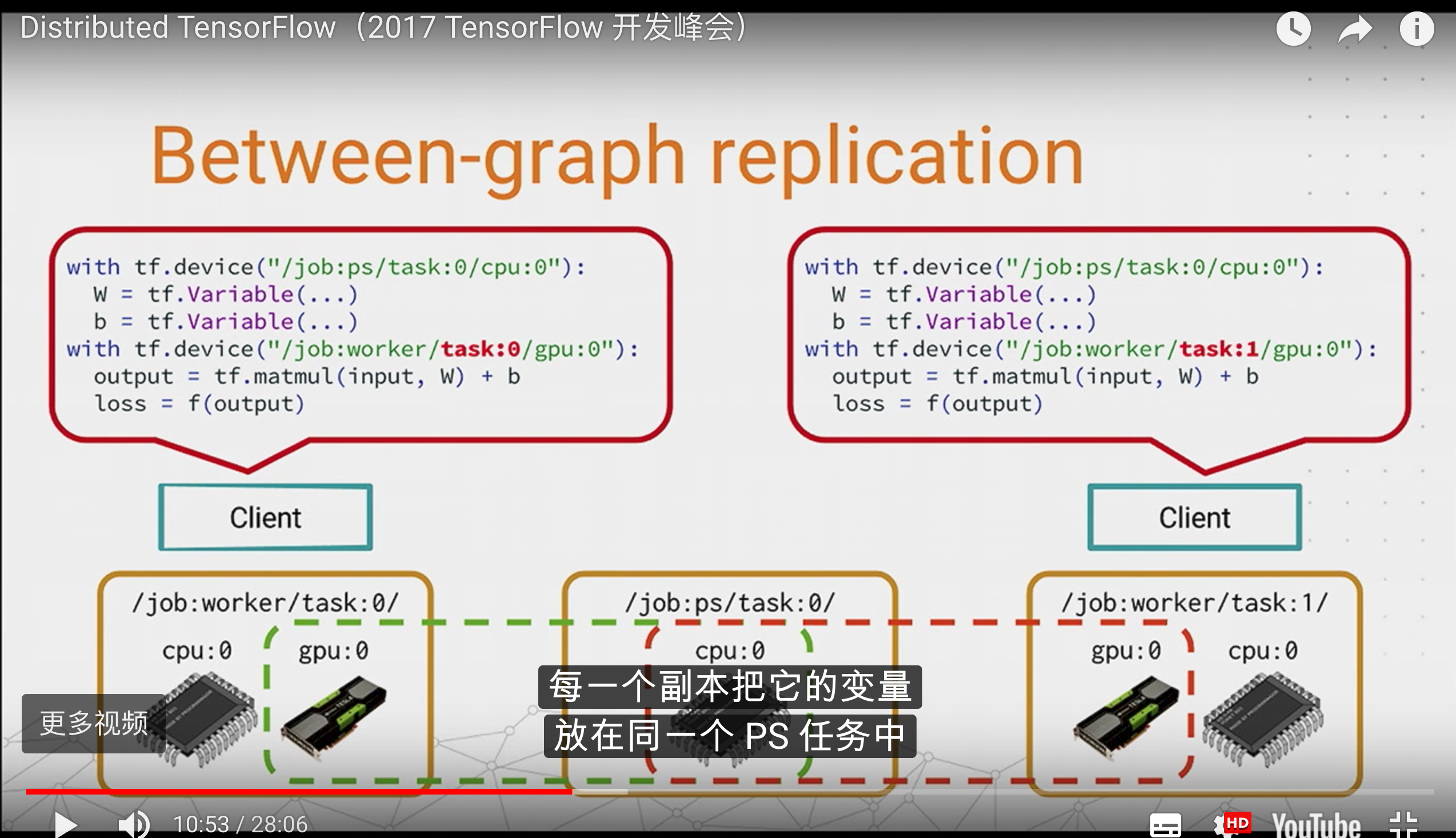
有很多独立的client,各个client构建了相同的graph(包含参数,通过使用tf.train.replica_device_setter,将这些参数映射到ps_server上.)
between-graph模式下,训练的参数保存在参数服务器,数据不用分发,数据分片的保存在各个计算节点,各个计算节点自己算自己的,算完了之后,把要更新的参数告诉参数服务器,参数服务器更新参数。这种模式的优点是不用训练数据的分发了,尤其是在数据量在TB级的时候,节省了大量的时间,所以大数据深度学习还是推荐使用between-graph模式。
同步更新和异步更新
in-graph模式和between-graph模式都支持同步和异步更新
在同步更新的时候,每次梯度更新,要等所有分发出去的数据计算完成后,返回回来结果之后,把梯度累加算了均值之后,再更新参数。这样的好处是loss的下降比较稳定,但是这个的坏处也很明显,处理的速度取决于最慢的那个分片计算的时间。
在异步更新的时候,所有的计算节点,各自算自己的,更新参数也是自己更新自己计算的结果,这样的优点就是计算速度快,计算资源能得到充分利用,但是缺点是loss的下降不稳定,抖动大。
在数据量小的情况下,各个节点的计算能力比较均衡的情况下,推荐使用同步模式;数据量很大,各个机器的计算性能掺差不齐的情况下,推荐使用异步的方式。
官方分布式文档:https://www.tensorflow.org/deploy/distributed
replica_device_setter
round-robin模式:
什么参数都不传,默认是round-robin
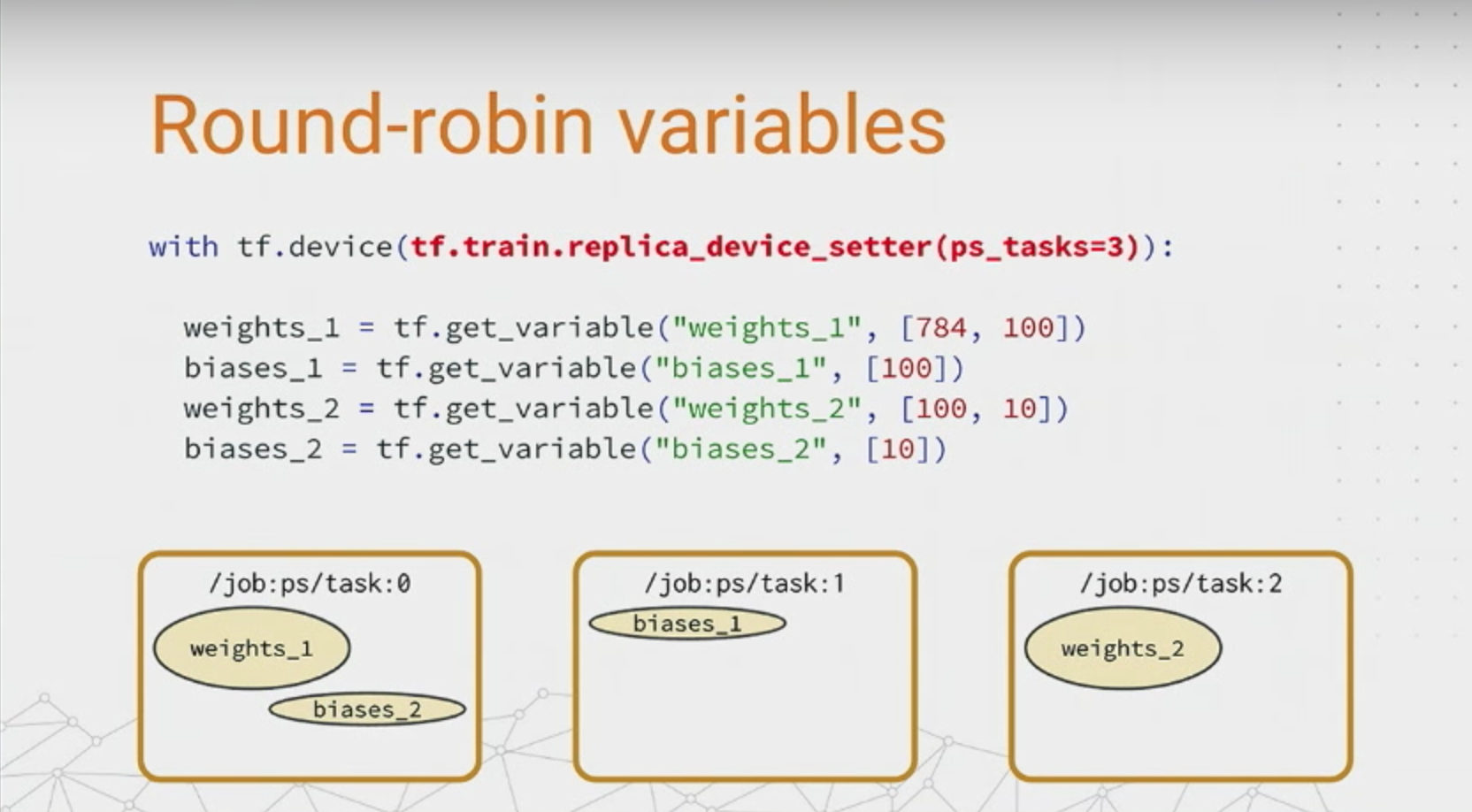
但如果只有两个ps任务,可能会把weight都给一个,bias都给另一个,这样就很不利。
greedystrategy
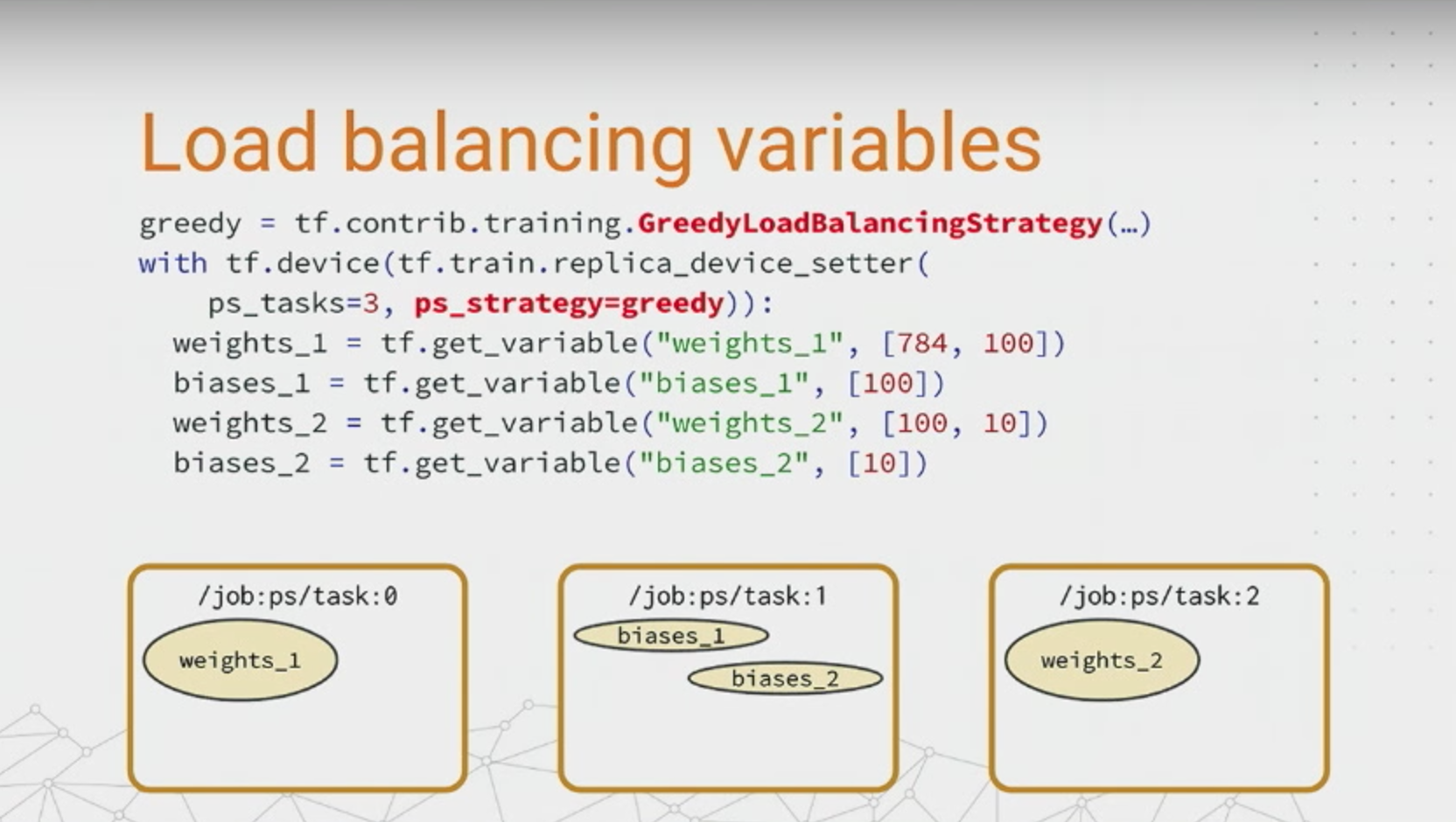
依据变量占用的内存,会相对负载均衡。
partition
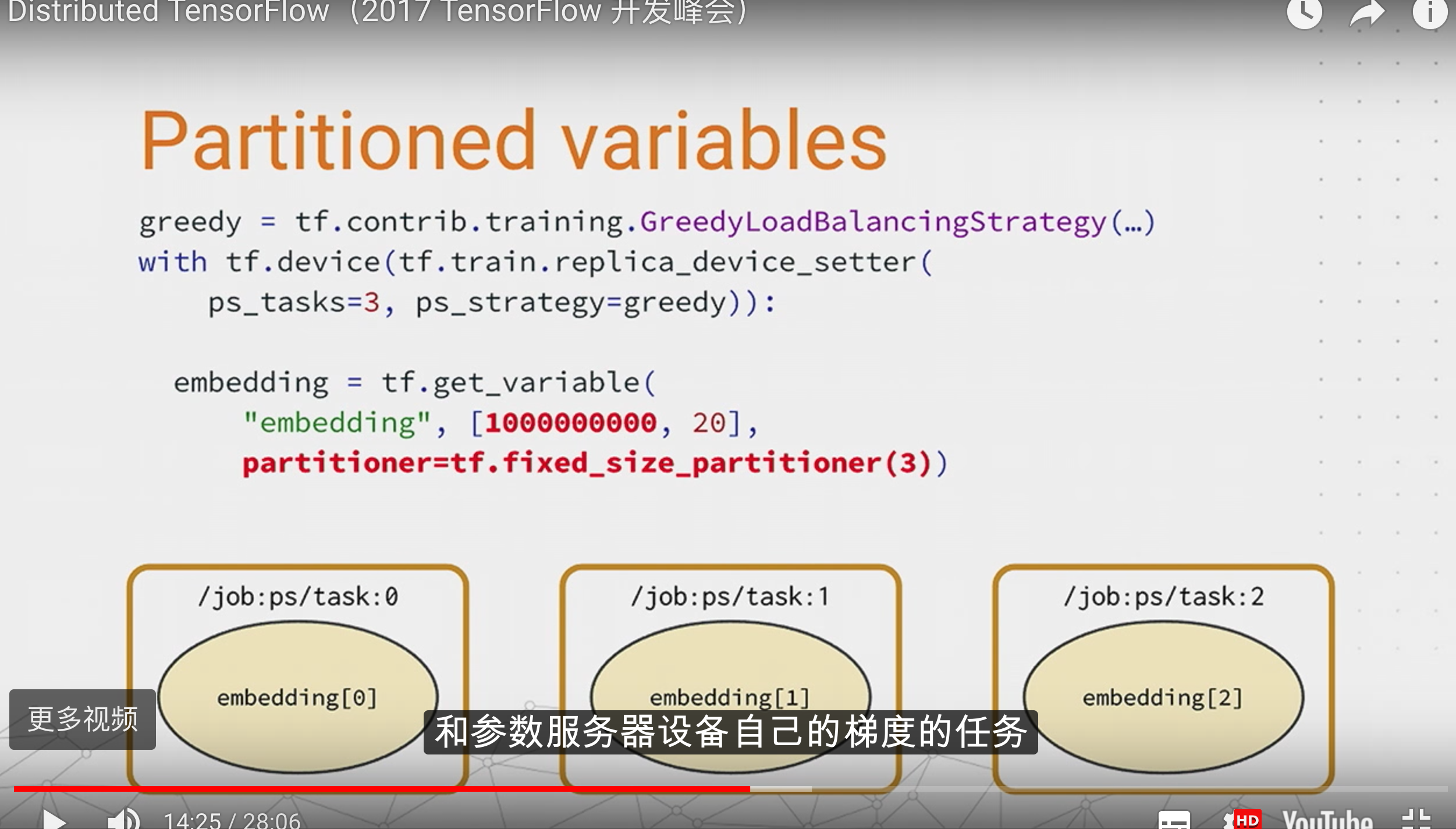
如果embedding需要lookup的表非常大,可以直接指定partition,这样在查表的时候,也只会去相应的partition查。
Sessionis and servers
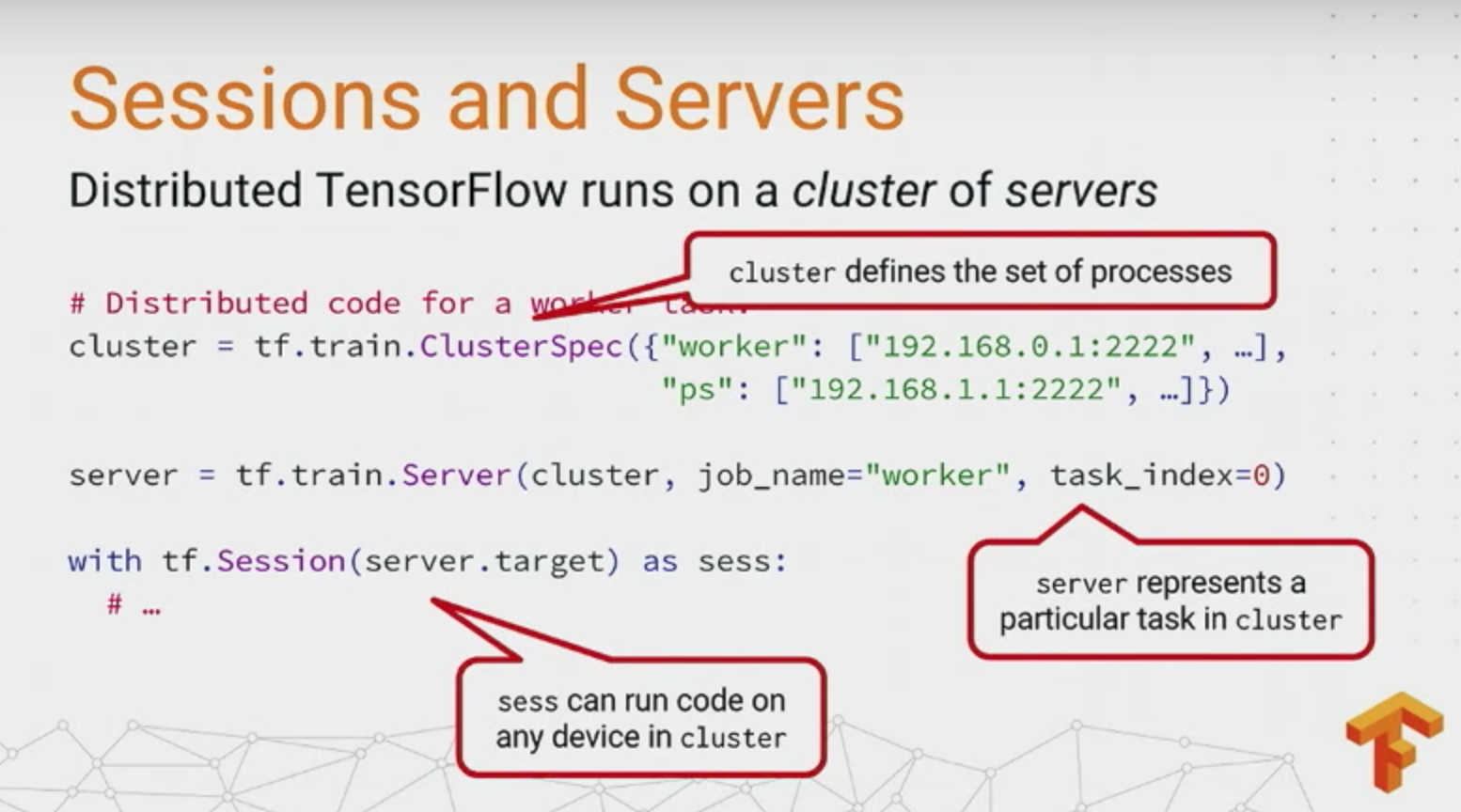
ClusterSpec是一个字典,每个节点都存同一份(如果是K8s之类的,会有集群管理者)
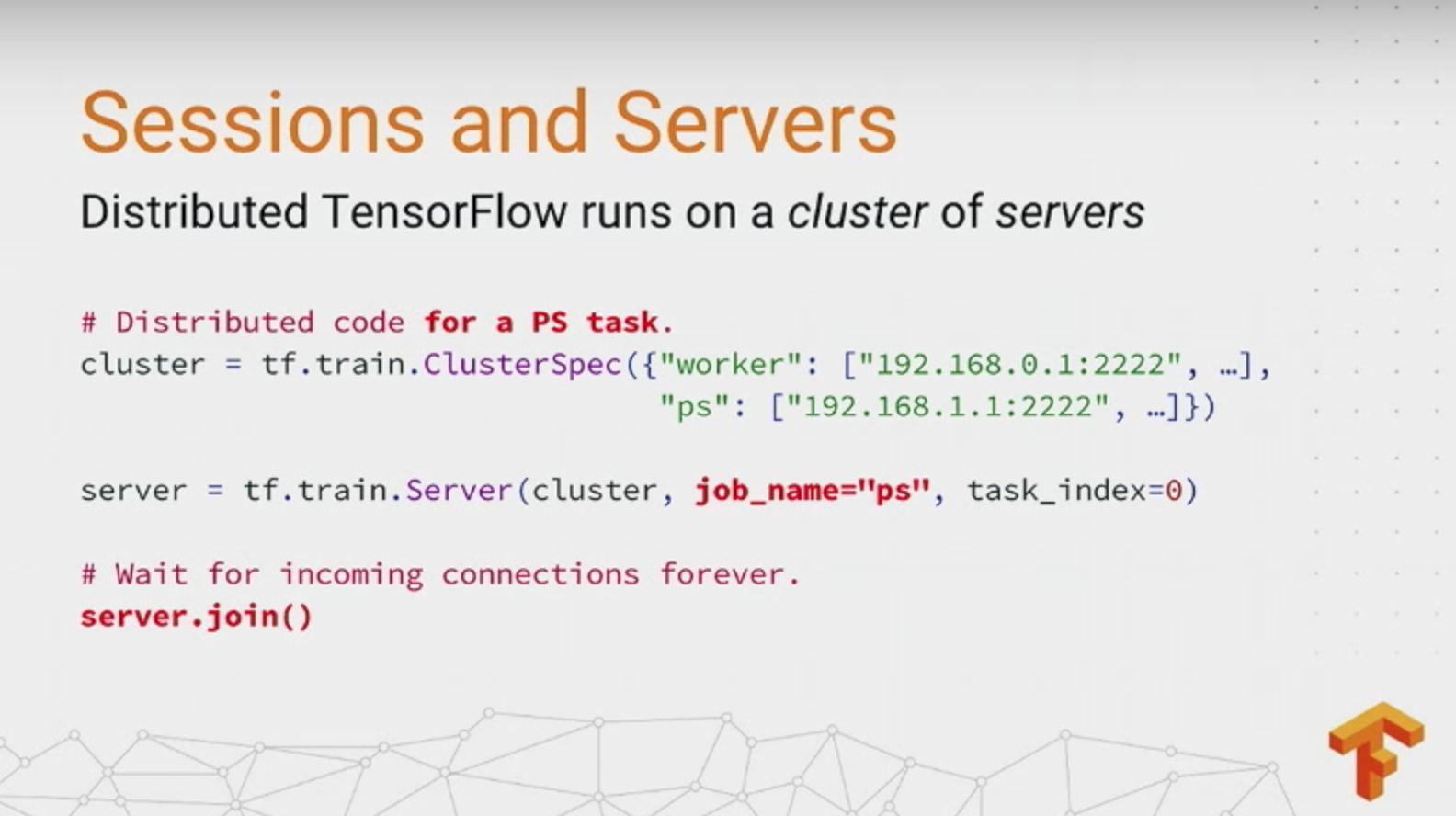
ps代码:
fault tolerance
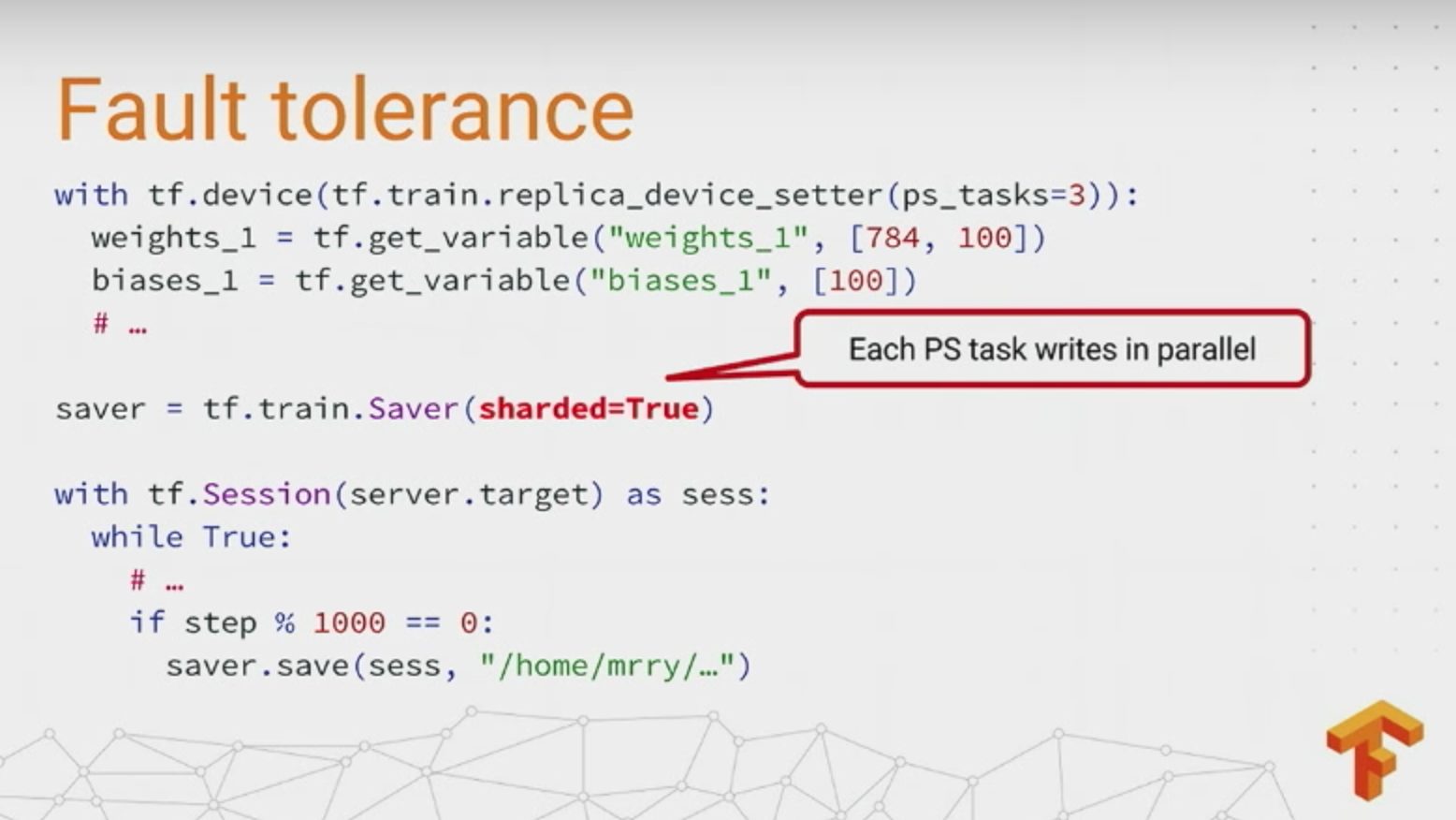
设置saver的sharded=True,因为例如有3个ps,那么每个的saver就会保存它自己的全部变量。
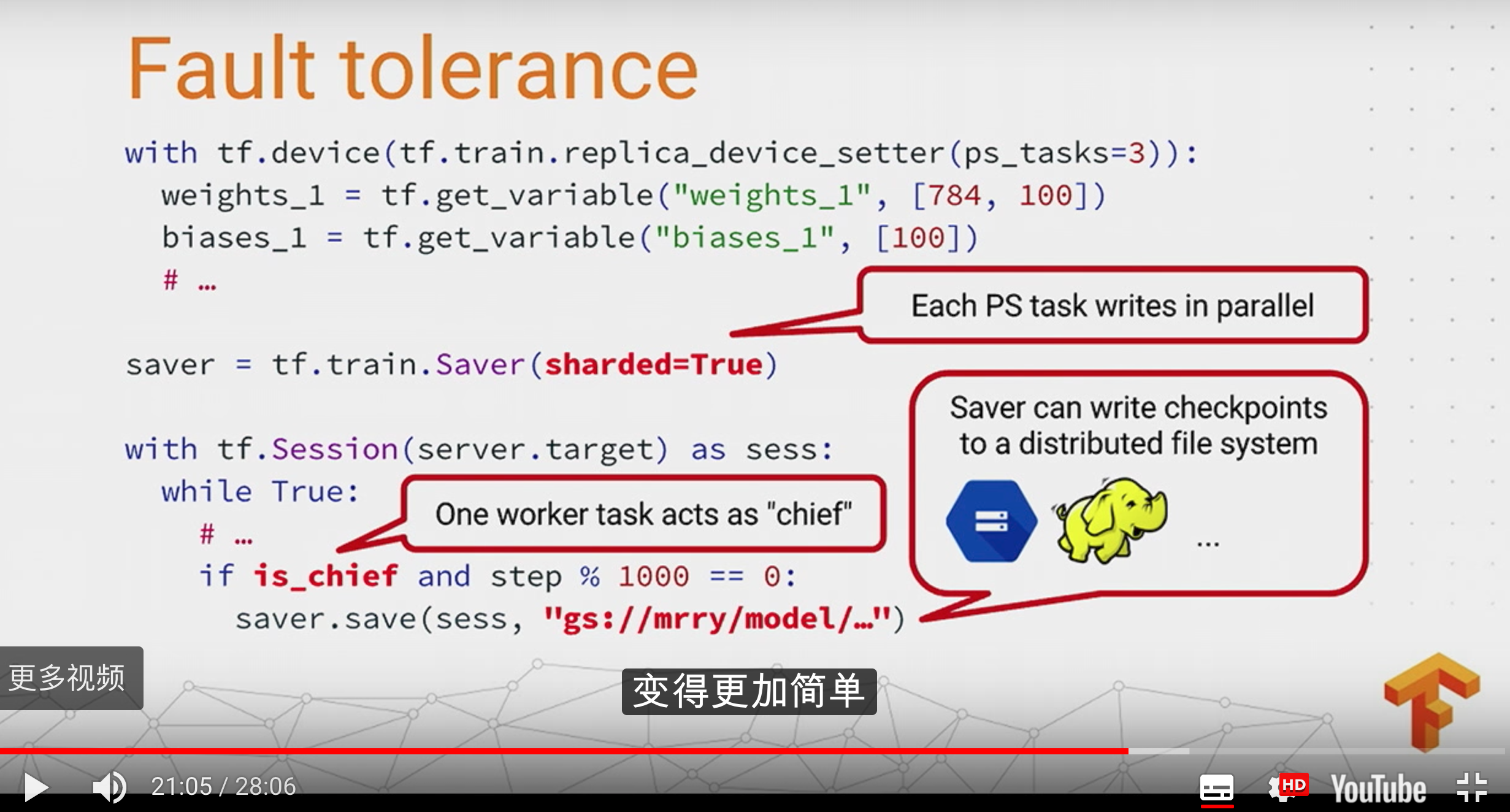
save的条件是,只有是chief(完成初始化参数、写检查点、写结果给tensorboard等)的时候才写。另外,写文件的地址可以是hdfs、google cloud等。
故障恢复
如果一个非chief的worker挂了,问题不大,重新启动一个就行了
如果一个ps挂了,chief会暂停所有worker的作业,并在上一个检查点恢复所有ps任务
如果chief挂了,类似ps挂,全部暂停,等故障修复后,把chief恢复到上一个检查点的状态。当然,也可以用zookeeper,用选举的机制,选出一个新的chief,而不用全部暂停。
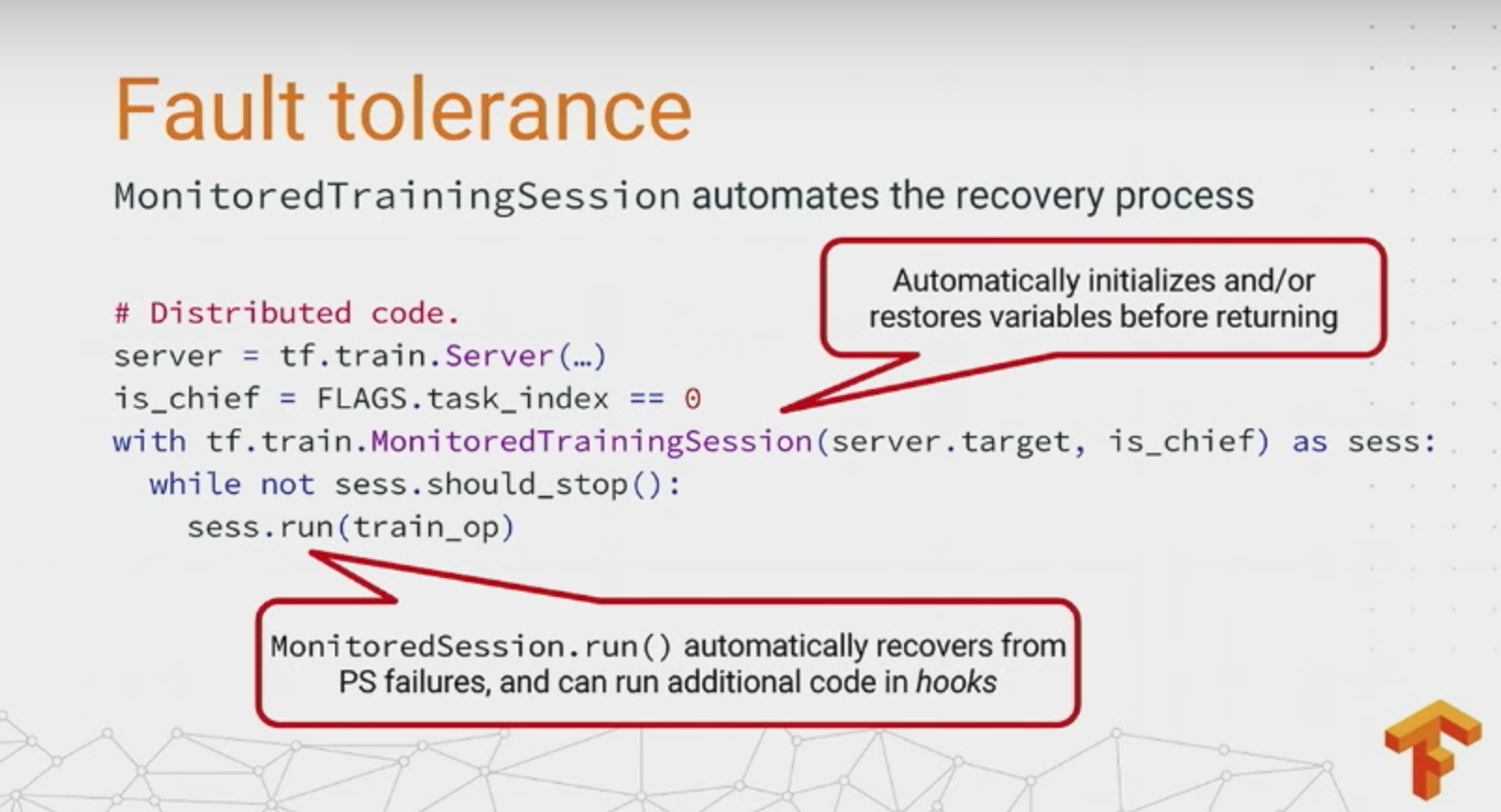
MonitoredTrainingSession每10min都随着编写检查点的hook出现一次,每100个steps会写一次summary
高level的api:experiment:
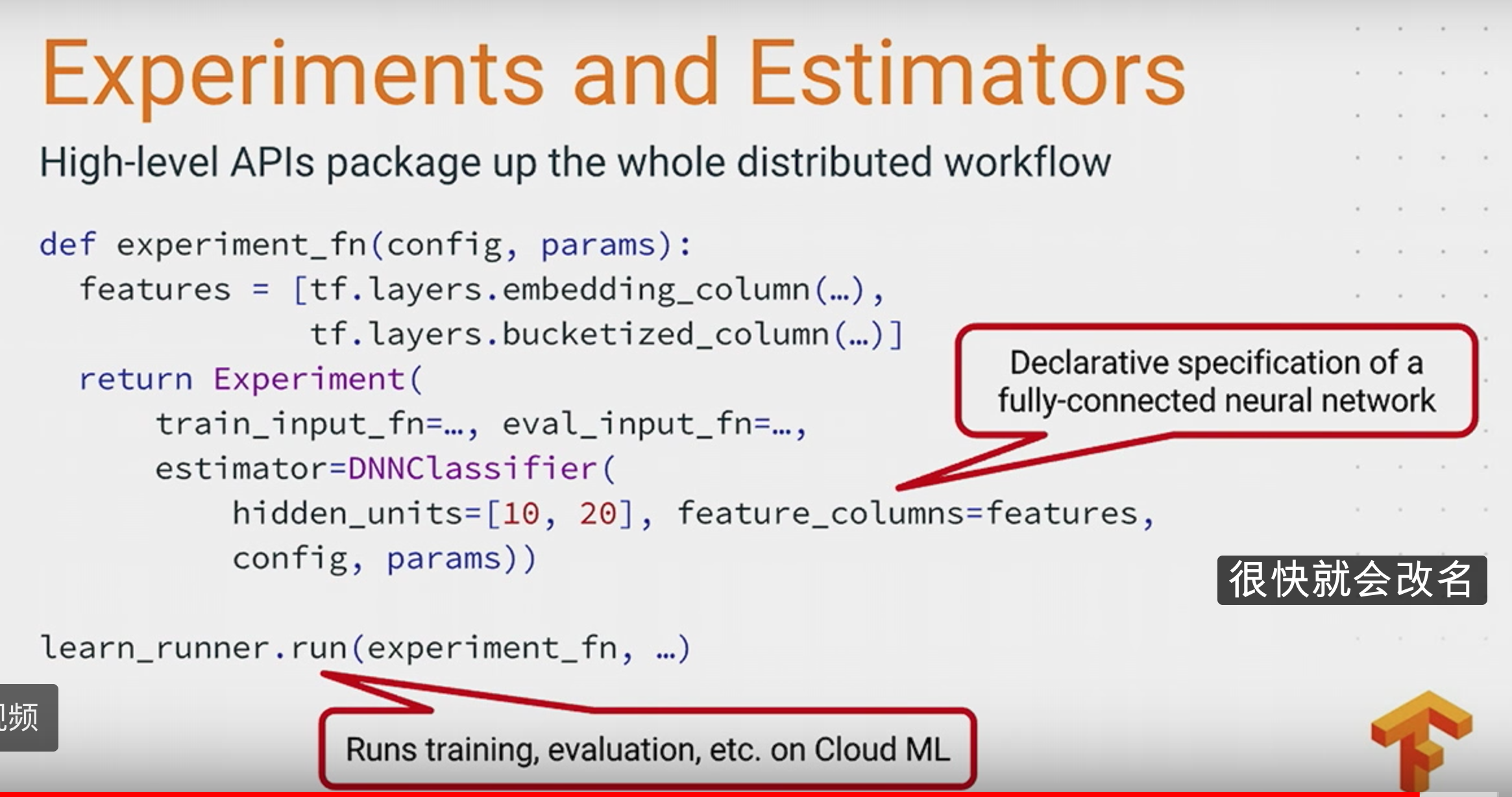
详见:
https://www.tensorflow.org/deploy/distributed
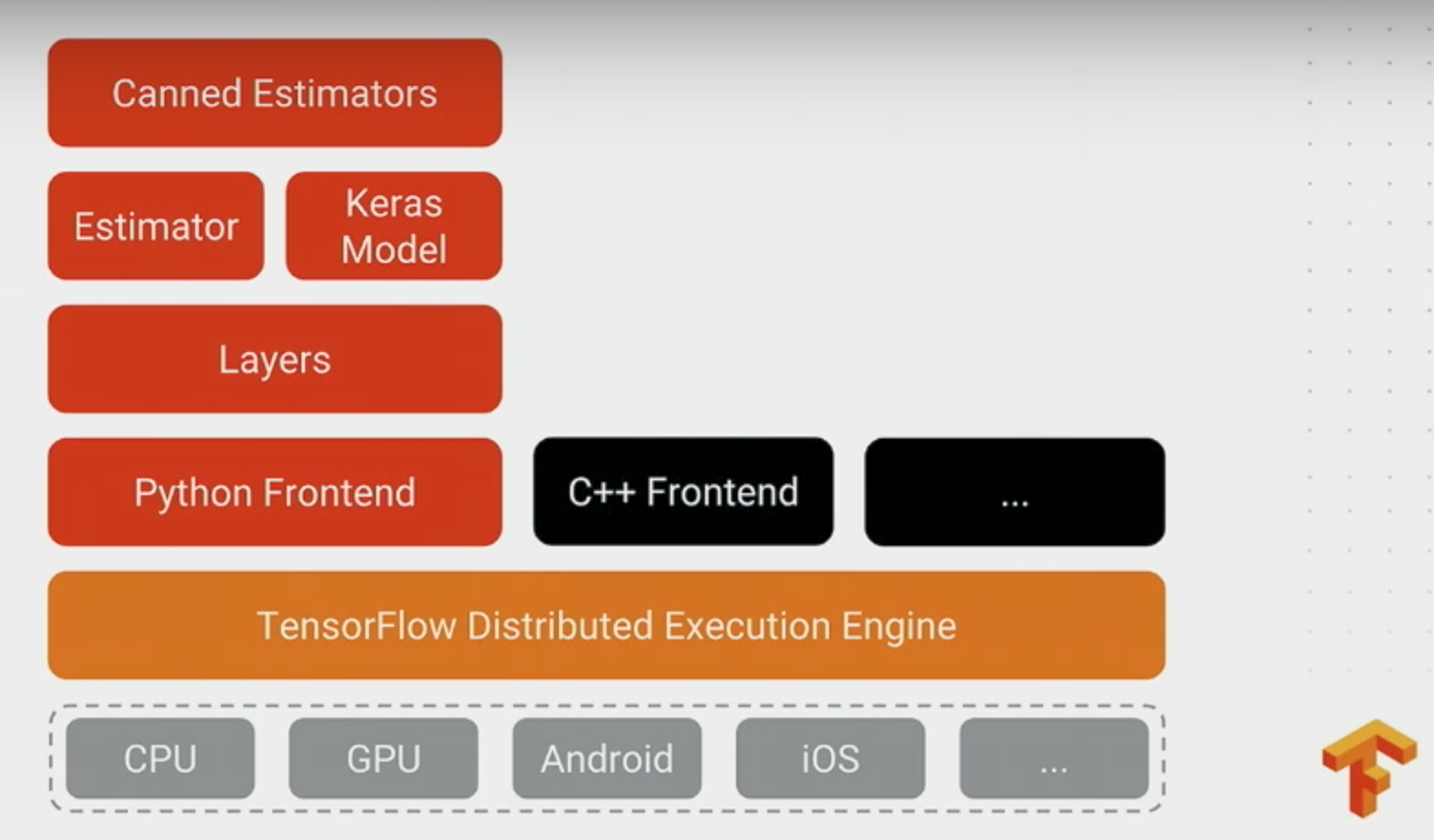
https://www.tensorflow.org/extend/architecture
https://www.tensorflow.org/extend/estimators
简单的demo:
原创文章,转载请注明出处!
本文链接:http://daiwk.github.io/posts/platform-tensorflow-distributed-deploy.html